教授,博导,邮箱:65612405@qq.com

1.简历
全国高等学校创新创业教育工作突出者,中华医学会物理医学与康复学分会学组成员、省部级人才、江西省VR产业创新优秀人才团队“基于虚拟现实的智能云康复系统研发团队”负责人。
从事医药领域的人工智能、数字孪生及智能装备的研究20余年,在上述领域获得丰硕的成果。主持完成国家自然科学基金3项,作为核心成员完成国家863计划1项,主持完成江西省VR产业优秀人才团队的基于虚拟现实的智能云康复系统研发和其他省部级项目9项,累计主持的项目经费400余万;在人工智能、数字孪生、智能装备领域以第一作者或通信作者发表论文40余篇,其中top期刊论文1篇,发表SCI期刊论文近30篇,在《IEEE Transaction on Instrumentation& Measurement》等 ScopusQ1高水平论文10余篇。申请发明专利20余项。
曾任南昌大学虚拟现实产业技术研究中心副主任、南昌大学自动化系主任、南昌大学信息工程学院党委委员分管学院研究生和国际合作工作,江西省自动化学会秘书长。在产学研落地方面,2019年曾兼职担任过南方科技大学台州研究院院长助理4个月,协助院长进行研究院管理工作,分管院研究院的科技和财务工作,负责南方科技大学项目和自己项目产业化及孵化。后因为担任南昌大学系主任工作需要辞去台州研究院兼职,带领自动化系自动化专业和仪器专业两个专业先后拿下专业工程认证和国家一流专业。2022年2月以高层次人才引进入职上海工程技术大学电子电气工程学院。
2.奖励
全国高等学校创新创业教育工作突出者,2021
第一作者论文“Upper limb rehabilitationdevice based on adaptive impedance control”荣获世界康复机器人大会(WRRC 2024)最佳论文奖和优秀汇报奖。
3.科学成果简述
掌握的核心技术和研究成果主要包括:1)基于虚拟现实的智能云康复系列产品:VR示教训练与评估一体化康复系统和智能VR主被动康复系统。其中第一代样机智能康复机器人参加了第六届中国国际互联网+大学生创新创业比赛及中国“智创未来”全球创新创业成果展。孙春兰总理对作品与团队给予了肯定与鼓励,同时作品被中央电视台新闻联播报导。两个产品的第二代样机已经正在进行临床试验,为其三类医疗器械注册做好准备。2)国家863计划研发成果脑外科虚拟手术仿真系统鉴定为在沉浸感和视觉逼真性方面达到国际领先水平,并被科技部指定参加2016年中国国际工博会展出。3)支气管镜智能辅助诊断系统,能够在支气管镜下自动识别支气管结核并分型,已经在江西省胸科医院两个院区、景德镇第五医院等展开测试。具体如下:
1)智能康复系统
在江西省VR产业创新优秀人才团队计划支持下完成了智能VR主被动云康复系列样机。申请了6项发明和3项实用新型专利.研制的5个康复系统样机在南昌大学第二附属如图1所示。其中上肢外骨骼康复机器人的文章“Upper limbrehabilitation device based on adaptive impedance control”荣获首届世界康复机器人大会(WRRC 2024)最佳论文奖和优秀汇报奖。

图1 智能康复系统样机在南昌大学第二附属医院临床测试
2)在人工智能算法研究方面
在江西省卫健委科技创新重点项目人工智能辅助内镜(呼吸)诊断技术研究项目资助下,完成了支气管镜智能辅助诊断系统,目前已经在江西省胸科医院和景德镇第5医院临床测试,并建立支气管镜人工智能辅助诊断系统和支气管结核云服务平台,如图2所示,并申请中国发明专利2项和美国发明专利1项,软件著作权3项。
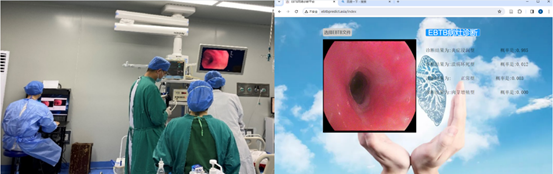
图2支气管镜智能辅助诊断系统
3)虚拟手术仿真系统与数字孪生
在国家863计划资助下胡凌燕教授负责完成手术虚拟系统中的软组织几何及力学建模、力反馈控制研究。该项目按照科技部要求组织国内同行专家进行鉴定:该虚拟手术训练系统在沉浸感和视觉逼真性方面达到国际领先水平,并被科技部指定参加2016年中国国际工博会展出。研究的虚拟手术平台如图3所示。

图3 虚拟手术仿真平台
在药物制剂装备的数字孪生系统方面,申请人胡凌燕和袁春平合作对侯惠民院士研制的渗透泵控释片激光打孔机的数字孪生系统开展研究、建立了激光打孔机和热塑包衣设备及其车间的数字孪生系统如图4所示。一方面基于人工智能学习实现制药工艺参数优化以及药厂管理优化,另外一方面与上海药品审评核查中心及多家药企合作,完成《药品先进制造数字孪生技术要求》标准,为药物评审监督管理部门评审核查改革探索新思路。

图4激光打孔机数字孪生系统与数字孪生药厂
4)机器人控制

图5主从遥操作手术机器人实验平台
2015年在加拿大卡尔加里博士后研究时,在neuroArm医疗中心,从事手术机器人研究。回国后在国家自然科学基金资助下,申请人已经搭建了2套主从遥控操作的手术机器人平台,如图6所示.

图6移动协作机器人
能够完成移动机器人到指定位置巡检、机械臂完成取样等作业任务,移动本体可以是履带式、轮式、机器狗等都可以。简单作业任务自主完成,复杂作业任务远程遥控操作完成。
现任上海工程技术大学和南昌大学的控制科学与工程和电子信息硕士导师,南昌大学工业控制博士点导师,及上海工程技术大学机械工程博士点导师,欢迎愿意加盟的研究生和本科生,也欢迎企业产学研合作。
4.主要主持的科研项目
1)主持上海市科技计划项目《移动协作机器人关键技术及其产业化》,50万。
2)主持横向课题上海懿泓科技有限公司《移动协作机器人》,合同经费125万。
3)主持人工智能辅助内镜(呼吸)诊断技术研究,江西省卫健委科技创新重点项目子项目,35万。
4)主持省级VR产业创新创业优秀人才团队项目《基于虚拟现实的智能云康复系统研发团队》,200万,已结题。
5)主持国家自然科学基金《基于虚拟仿真预测的遥操作手术机器人快速精准、鲁棒的主从轨迹跟踪及高逼真度力反馈问题研究》,33万,已结题。。
6)主持国家自然科学基金《复杂环境下多主从遥操作机器人网络控制方法的研究》,43.6万,已结题。
7)主持国家自然科学基金《基于增强现实的主从遥操作手术机器人系统中的力反馈问题研究》,21.2万,已结题。
8)国家863 计划《脑外科虚拟手术仿真与训练系统关键技术研究》核心参与人,负责力反馈稳定控制算法,已结题。
9)主持赣锋锂业有限公司《熔岩电解锂自动收集成套装置与系统开发》,40万,已结题。
10)主持江西省杰出青年人才计划项目(20171BCB23008),15万,2021年已结题。
11)主持省自然科学基金《基于脑机接口的智能外骨骼康复机器人控制算法研究》,2021年已结题。
12)主持省科技支撑计划《基于增强现实的核工业多功能遥操作巡检机器人研究》,2018年已结题。
13)主持省自然基金《基于无源理论的虚拟现实触觉交互系统力反馈稳定控制算法》,2017年已结题。
14)主持省自然基金《刚性环境下无线工业遥操作系统控制算法的研究》,2015已结题。
15)主持省自然基金《遥操作机器人的主从跟踪和力反馈算法的研究》,2010年已结题。
5. 主要知识产权
1) 胡凌燕等。国家发明专利。手术稳定控制的仿真方法。CN201510698252.0,2018.12,已授权。
2) 胡凌燕等,国家发明专利,一种应用于移动平台的超声波阵列避障系统,201710068766.7,2018.11,已授权。
3) 胡凌燕等,国家发明专利,能适应复杂非结构化地形的巡检机器人,ZL 2014 10065048.0,2017.11,已授权。
4) 胡凌燕等。国家发明专利。一种基于分段人工神经网络的软组织穿刺力建模方法,201910155896.3,2019.3。已授权。
5) 胡凌燕等。国家发明专利,一种基于IMU惯导传感器的虚拟现实人体康复训练系统,2021104369462,2021.04。
6) 胡凌燕等。国家发明专利。基于非侵入式脑机接口的脑控系统及其实现方法。202121029486.3,2021.5.14。
7) 胡凌燕等。国家发明专利。一种基于虚拟现实的上肢康复训练系统202211354330.1,2022.11
8) 胡凌燕等。国家发明专利。一种左右手交换机构及其上肢外骨骼康复机器人,202211471272.0, 2022.11
9) 张珈瑜,胡凌燕等。国家发明专利。上肢关节活动能力评估系统及方法专利内容,202210550368.X,2022.5.20
10) 胡凌燕等。国家发明专利。一种多通道双极性功能性电刺激电路,202211708119.5,2022.12.29。
11) 胡凌燕等。国家发明专利。自适应的流固耦合模拟方法,CN202310505285.3.2023-05-06。
12) 侯惠民, 胡凌燕等。国家发明专利。一种下膜循环运动的热塑包衣连续生产方法及装置,202410159913.1,2024.5。
13) 胡凌燕等。国家发明专利。一种支气管结核分型确定方法、装置及设备,202411058052.4,2024.10。
14) 胡凌燕等。国家发明专利。一支气管结核辅助诊断云服务平台。202411420078.9,2024.10。
15) 胡凌燕等。国家发明专利。一种轻量化的电动快换装置。202411378663.7,2024.11。
16) 胡凌燕等,国家发明专利。自适应调节的功能性电刺激康复训练方法和装置。202410859539.6,2024.6.28.
17) 胡凌燕等,国家发明专利。基于功能性电刺激的神经肌肉协同康复训练方法及装置。202410945509.7,2024.7.15
18) 胡凌燕等。计算机软件著作权。外科虚拟手术力反馈输出稳定控制设计软件,2018SR736825,2018.12,已授权。
19) 胡凌燕等。计算机软件著作权。基于点云的碰撞检测平台, 2014SR110197,2014.5,已授权。
20) 胡凌燕等。计算机软件著作权。基于LMD和CSP的多特征融合脑电信号识别平台,2021SR0566268,2021.7,已授权。
21) 胡凌燕等。计算机软件著作权。膜剂分切包装控制软件,2023SR0047074,2023.1.9, 已授权。
22) 胡凌燕等。计算机软件著作权。基于SSD目标物体6D位姿检测的机械臂抓取软件,2023R11L2084691,2023.10。
23) 胡凌燕等。计算机软件著作权。基于数字孪生技术的医药行业机器人控制虚拟仿真平台软件,2023R11L2549007,2023.11。
24) 胡凌燕等。计算机软件著作权。ResNet与卷积块注意力相结合的支气管结核智能诊断系统,2024R11L2469374,2024.10。
25) 胡凌燕等。计算机软件著作权。VR智能上肢康复训练与评估一体化系统,2024SR0843927,2024.1。
6. 近五年代表作文章(通信作者和第一作者):
1)Finite-time Switching Resilient Control for Networked Teleoperation Systemwith Time-Varying Delays and Random DoS Attacks.IEEE Transactions on Industrial Cyber-Physical Systems,v2, p232-243, 2024.(EI,第一作者)
2) A Target Grabbing Strategy for Telerobot Basedon Developed Stiffness Display Device. IEEE/CAA Journal of Automatica Sinica,2017,4(4):88-94,top期刊,通信作者)
3) A vortex method of 3D smoke simulation forvirtual surgery. Computer Methods and Programs in Biomedicine, 2021,198(12):105813. (SCI, 第一作者)
4) Multi-feature fusion method based on WOSF andMSE for four-class MI EEG identification, Biomedical Signal Processing andControl, 2021, 69(8): 102907.(SCI, 第一作者)
5) A Highlight-Generation Method for RenderingTranslucent Objects. Sensors. 2019, 19(4): 860-874.(SCI, 通信作者)
6) Second-order adaptive integral terminalsliding mode approach to tracking control of robotic manipulators[J]. IETControl Theory & Applications, 15 (17) , pp.2145-2157. Nov 2021.(SCI,通信作者)
7)Upper limb rehabilitation device based onadaptive impedance control.(i-CREATe 2024 & WRRC 2024会议,第一作者,最佳会议论文奖)
7. 指导学生华东赛区和国家级获奖:
中国国际创新大赛、挑战杯
1)2019,吴承哲,第五届”互联网+“大学生创新创业大赛国家级铜奖、
2)2018,王晨晨,刘国昱,张强,第四届“互联网+”大学生创新创业大赛国家级银奖
3)2017,吴承哲,第三届“互联网+"大学生创新创业大赛国家级银奖、
4)2016,《VR手术专家》,第二届“互联网+"大学生创新创业大赛国家级银奖
研究生电子设计大赛、建模大赛
5)2018,王晨晨,陈马俊,徐德华,“兆易”创新杯研究生电子设计大赛国家二等奖
6) 2018,殷祥钊,第十五届“华为杯”全国研究生数学建模竞赛
7) 2020,《基于视觉避障的移动搬运机器人》第十五届中国研究生电子设计竞赛研电赛华中赛区一等奖。
8)2023.7《上肢功能性电刺激康复系统》第十八届中国研究生电子设计竞赛中荣获华中分赛区一等奖
全国大学生智能汽车竞赛
9)2018,全国大学生智能汽车竞赛全国总决赛信标组比赛,国家级一等奖
10)2021,全国大学生智能汽车竞赛全国总决赛电磁越野组比赛, 国家级一等奖
11)2018,全国大学生智能汽车竞赛全国总决赛双车会车组,国家二等奖
12)2018,第十三届全国大学生智能汽车竞赛全国总决赛公路赛电磁组,国家三等奖
其他竞赛
13)2019,曾雷,全国高校计算机能力大赛office高级应用赛三等奖 2019
14)2024,郭强,付永康,李彦哲。第六届中国研究生机器人创新设计大赛全国总决赛三等奖。